开源硬件
Arduino
客制化键盘
Arduino_寄存器
二进制运算
寄存器+二进制运算
LCD-逐字显示
密码依次录入
等待输入
WiFi Duck(无线击键注入攻击平台)
WiFi Duc-New
WiFi Duc-Old
蓝牙无线烧录
ESP8266
ESP-NOW
ESP8266看门狗
ESP8266-休眠模式
ESP01/01S使用说明
WIFI_SD
ESP8266-Web服务器
ESP8266-WIFI自动认证
ESP32
ESP32 ADC2
ESP32_PWM
ESP32_CAM
ESP32 小坦克
ESP32_限电保护
Arduino IDE 添加 ESP32
ESP32-iPhone BLE攻击
STM32
STM32F103-虚拟键盘
STC
STC8G1K08(A)
树莓派-触摸屏
Arduino IDE
Arduino_自制库
Arduino库收集
常见排序算法
冒泡排序
选择排序
插入排序
希尔排序
归并排序
快速排序
计数排序
预处理
millis(运行时长)
Arduino IDE 2.X-修改数据位置
Mixly
Mixly安装教程
Mixly 模块介绍
Mixly-添加ESP32CAM支持
Mixly-库定制工具
模块
4G模块连接物联网
GPS模块
语音模块(JQ8900)
安信可VB语音识别
28BYJ-48(5V步进)
FreeRTOS
FreeRTOS-多任务基础
FreeRTOS-任务共享全局变量
FreeRTOS-多核多任务
FreeRTOS-MUTEX
FreeRTOS-常规程序改多任务
FreeRTOS-定时器
LaserGRBL(激光雕刻)
LaserGRBL-GRBL
GRBL-CNC Shield v4
MicroPython
Scratch
Wokwi(在线仿真)
html转无符号数组
待做开源项目
本文档使用 MrDoc 发布
-
+
首页
GRBL-CNC Shield v4
CNC Shield v3 是需要使用 Uno 来作为主控,CNC Shield v4 改为使用 Nano 作为主控 **引脚图:** 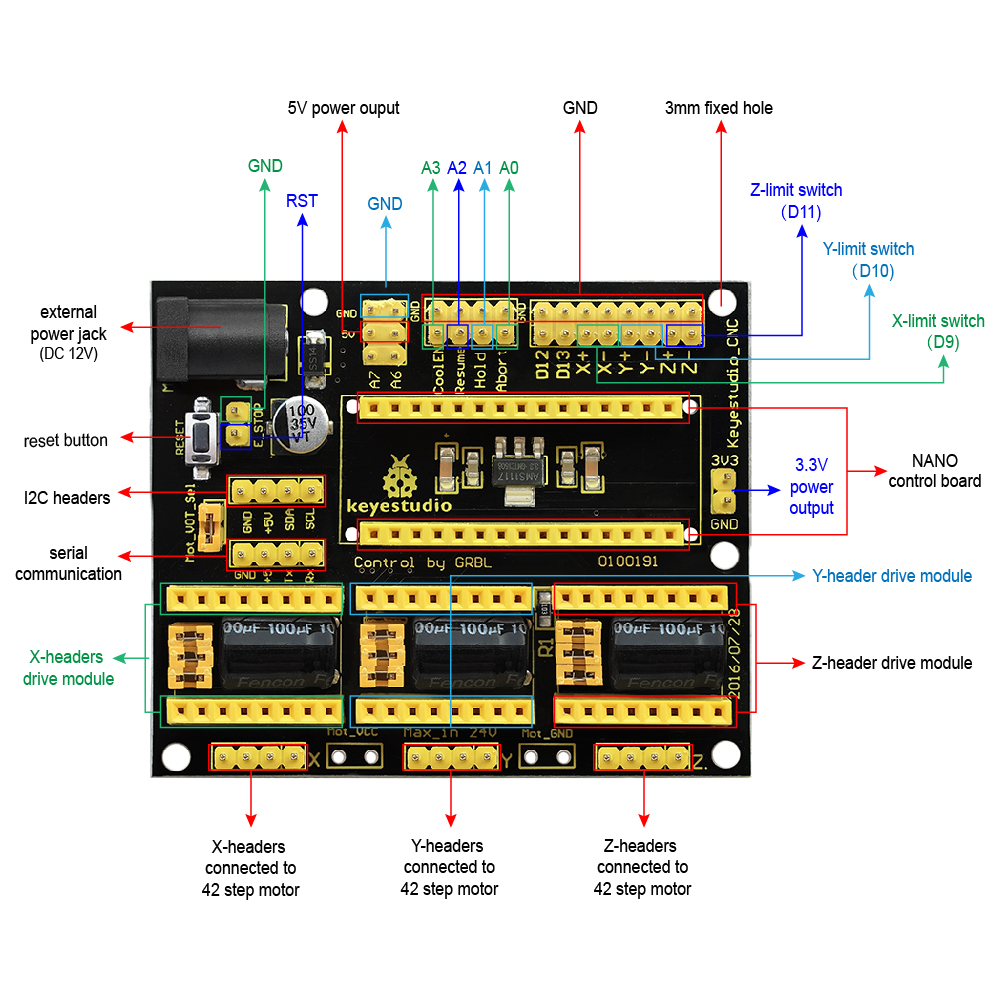 ## 注意事项 GRBL 默认引脚定义是按照 `CNC Shield v3` 来设定的,在 `CNC Shield v4` 中有些引脚是更改了的,必须要更改 `cpu_map.h` 文件中的配置方可使用 需注意的是:`除了步进相关的引脚可以修改,其他的哪怕看到填写的不正确也不可修改,不改可用改了反而无法使用...` Shield v3/4 步进引脚定义: --- | 参数 | 说明 | Shield v3(GRBL 默认) | Shield v4 | | --- | --- | --- | --- | | X_STEP_BIT | X轴 STEP(脉冲输出引脚) | 2 | 5 | | Y_STEP_BIT | Y轴 STEP(脉冲输出引脚) | 3 | 6 | | Z_STEP_BIT | Z轴 STEP(脉冲输出引脚) | 4 | 7 | | X_DIRECTION_BIT | X轴DIR(方向输出引脚) | 5 | 2 | | Y_DIRECTION_BIT | Y轴DIR(方向输出引脚) | 6 | 3 | | Z_DIRECTION_BIT | Z轴DIR(方向输出引脚) | 7 | 4 | 细分设计错误: --- - 错误说明: 正常步进电机跳线应该是连接到VCC的,在 CNC Shield v4 中出现设计错误,连接到了GND,这样则意味着不论跳线帽安不安装将始终工作在全细分(200步/圈) - 解决方式: 如果使用16细分,把跳线帽拆除,飞线连接跳线与M1/M2/M3直连引脚和电机驱动上的VDD,如图👇(其他VCC引脚也都圈了出来) 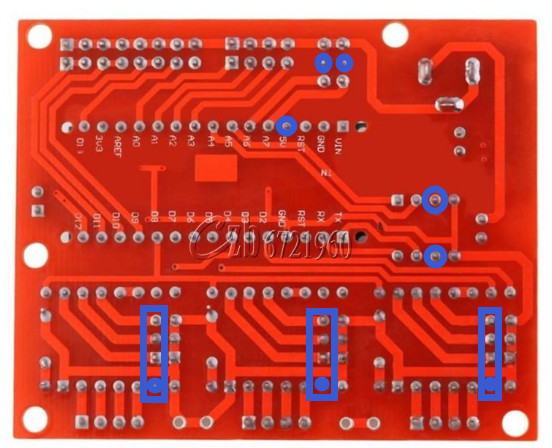 主轴(激光)引脚: --- 主轴(激光)和Z限位受到 `VARIABLE_SPINDLE(可变PWM主轴)` 影响 - 启用:主轴(激光)——>D11,Z限位——>D12 - 禁用:主轴(激光)——>D12,Z限位——>D11 启用激光模式: --- ```bash $32=1 # 启用激光 # 开启后M3/M4只有在发送移动指令后才会生效 ``` 硬件限位: --- 默认2线限位,是低触发 ```bash $20=0 # 软限位(关闭) $21=1 # 硬限位(打开) $22=1 # 归位使能(打开) $23=0 # 归位方向位(Max=0/Min=1)(zyx二进制掩码转十进制后填写) # config.h 中可配置归零方式(HOMING_CYCLE_0、HOMING_CYCLE_1 依次归位) ## 三轴归位(XY,Z) #define HOMING_CYCLE_0 ((1<<X_AXIS)|(1<<Y_AXIS)) // 先同时归位XY #define HOMING_CYCLE_1 (1<<Z_AXIS) // 再归位Z ## 三轴归位(Z,XY) #define HOMING_CYCLE_0 (1<<Z_AXIS) // 先归位Z #define HOMING_CYCLE_1 ((1<<X_AXIS)|(1<<Y_AXIS)) // 再同时归位XY ## 两轴同时归位(XY) #define HOMING_CYCLE_0 ((1<<X_AXIS)|(1<<Y_AXIS)) // 同时归位XY ## 两轴依次归位(X,Y) #define HOMING_CYCLE_0 (1<<X_AXIS) // 先归位X #define HOMING_CYCLE_1 (1<<Y_AXIS) // 再归位Y ``` 额外引脚: --- - `Mot_UOT_Sel` 这个是DC口给电机驱动供电的跳线帽 - `E_STOP` 这个是额外的复位引脚 - `Mot_VCC 和 Mot_GND` 是电机驱动额外供电排针,最大支持24V `注意:如果超过12V需要断开 Mot_UOT_Sel 处跳线,否则会烧毁 Nano`
造物者W
2023年10月19日 13:28
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
分享
链接
类型
密码
更新密码